
04:03
Summary
- PTC has introduced a new Onshape‑to‑NVIDIA Isaac Sim workflow, creating a direct path from CAD model to high‑fidelity robotics simulation by preserving mechanical intent from assemblies into simulation‑ready models.
- The workflow helps robotics teams validate designs earlier, enabling faster testing of kinematics, sensors, and motion behavior before physical prototypes exist.
- This collaboration marks a step toward more connected, cloud‑native robotics workflows, supporting parallel mechanical, software, and development at scale.
Robotics development is hard – not because teams lack ideas, but because the tools they rely on often don’t work together.
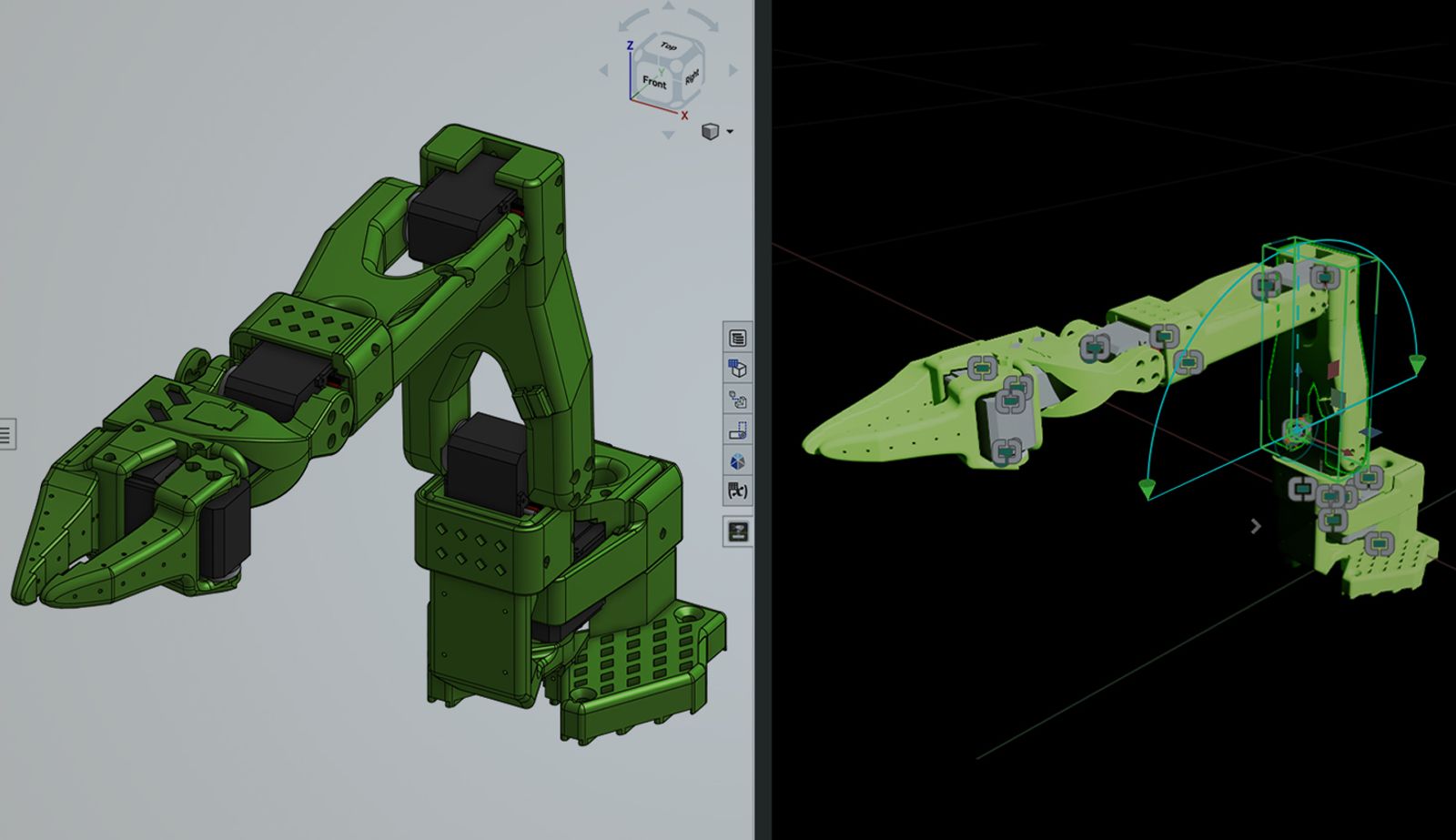
Mechanical models are created in CAD, then translated into simulation environments where motion, joints, and physical behavior must be recreated. Mechanical intent gets lost along the way, issues surface late, and teams spend valuable time rebuilding information that already existed upstream.
The workflow between Onshape and the NVIDIA Isaac Sim open simulation framework is designed to change that.
As part of a broader technical collaboration between PTC and NVIDIA, this new workflow connects cloud‑native CAD directly to high‑fidelity robotics simulation. The result is a smoother path from design to validation, one that helps robotics teams move faster, reduce risk, and iterate with confidence.
How Onshape‑to‑Isaac Sim Streamlines Robotics Workflows
One of the biggest bottlenecks in robotics development is the handoff from mechanical design to simulation. Geometry often needs to be rebuilt, joints redefined, or metadata recreated before meaningful testing can begin.
The Onshape‑to‑Isaac Sim workflow addresses this challenge head‑on by creating a direct, simulation‑ready bridge between CAD and robotics simulation.
From Mechanical Intent to Simulation‑Ready Models
Onshape Assemblies are built around high‑level mates that define real mechanical relationships between components, for instance, how parts are intended to move, rotate, and interact in the real world. Instead of relying on low‑level geometric constraints, assemblies capture behavior, not just position.
Through the workflow, these relationships can be extended with physical properties such as stiffness and damping, forming a simulation‑ready robotics model. When brought into NVIDIA Isaac Sim, that model provides a more accurate foundation for validating kinematics, motion, and system behavior in physics‑based virtual environments.
By carrying mechanical intent forward, teams avoid flattening designs into static representations and gain earlier insight into how systems will perform.
Continuous Iteration Without Rebuilds
Robotics designs rarely stand still. Geometry evolves, joints are refined, and system‑level behavior is continuously adjusted. In traditional workflows, even small changes can require simulation models to be rebuilt, introducing delays and errors.
With the Onshape‑to‑NVIDIA Isaac Sim workflow, simulation models remain connected to their source design. As assemblies change in Onshape, mechanical relationships and intent stay aligned downstream.
This continuity allows teams to iterate faster, test behavior earlier, and spend less time managing translations, accelerating development while preserving fidelity.
About the PTC and NVIDIA Collaboration
The Onshape‑to‑Isaac Sim workflow is part of a larger technical collaboration between PTC and NVIDIA, focused on real‑time simulation, digital twins, and AI‑enabled product development.
The collaboration is enabled through OpenUSD, an open and extensible 3D scene description framework, which preserves geometry fidelity while supporting simulation‑ready models.
Onshape’s existing relationship with AWS enables robotics teams to run Isaac Sim and related cloud workflows at scale using AWS compute infrastructure without managing local hardware or complex IT environments.
How Robotics Teams Use the Workflow
While every robotics organization is different, the design‑to‑simulation workflow follows a consistent pattern:
- Design and Define in Onshape: Mechanical teams define the geometry, degrees of freedom, and physical joint properties using cloud-native CAD and real-time collaboration.
- Export to Isaac Sim: Designs are brought directly into Isaac Sim with kinematics, joints, and structure preserved, via USD Export.
- Simulate and Validate: Teams test motion, sensors, collisions, and behavior in physics‑based virtual environments.
- Seamless Iteration: Simulation results drive design changes in CAD, which can be republished into Isaac Sim without the need for additional setup.
This approach supports applications ranging from industrial automation and warehouse robotics to autonomous mobile robots and collaborative humanoid robots.
The Future of Robotics Development Is Connected
Robotics development is no longer linear. Mechanical design, simulation, and AI training must happen in parallel, not in isolated silos.
By streamlining Onshape’s cloud‑native CAD with Isaac Sim high‑fidelity robotics simulation framework, PTC and NVIDIA are helping teams bridge long‑standing gaps between design and validation. The result is a more connected workflow that supports faster iteration, better collaboration, and smarter machines.
As digital twins, robotics, and cloud‑based development become the norm, this integration represents an important step toward the future of robotics engineering.
El programa Onshape Discovery
Descubra cómo los profesionales de CAD cualificados pueden obtener Onshape Professional durante un máximo de 6 meses, ¡sin coste alguno!
Contenido más reciente
- Blog
- Becoming an Expert
- Ensamblajes
Built to Scale: Why Large Assemblies Don’t Slow Down in Onshape
07.16.2026 Más información- Blog
- News from Onshape @ PTC
- Artificial Intelligence
Onshape Labs: AI in CAD Guided by Designers, Driven by Innovation
07.15.2026 Más información- Blog
- Evaluating Onshape
- Administración de datos
- Colaboración
- Artificial Intelligence
How the Most Underrated CAD Feature Improves Design Workflows
07.09.2026 Más información